
Digitalisierung – vom Spielzeug zur skalierbaren und erweiterbaren Architektur
By Autor In Allgemein On 6. Dezember 2022
Digitalisierung macht Spaß! Angeregt durch den Artikel „ExoMy: Mars-Rover zum Selberbauen“ hat SAB Geschäftsführer Dipl.-Phys.Ing. Stefan Scharr seinen eigenen Mars-Rover gebaut. Dieser Roboter dient nun als Anschauungs-Objekt für Seminare und Vorlesungen sowie für Präsentations-Zwecke. Denn was als Freizeitbeschäftigung begann, hat durchaus einen fachlich-relevanten Hintergrund. Der Rover und seine Einsatzmöglichkeiten zeigen eindrucksvoll, wie Hard- und Software individuell nach den jeweiligen Bedürfnissen entwickelt und angepasst werden kann.
Der Einstieg in die Robotik
Am Anfang stand der Bau des Rovers. Für alle Kunststoff-Bauteile sind auf github die notwendigen Dateien für den 3D-Druck hinterlegt. Die Liste der elektronischen Bauteile findet sich dort ebenso wie eine Anleitung für den Zusammenbau und ein Software-Repository.
Die Elektronik basiert auf Standard-Hardware wie Raspberry Pi 4B mit Steuerungsmodul für Schrittmotoren und Antriebsmotoren sowie einer einfachen Kamera. Eine Erweiterung wurde in Form eines „TP-Link M7200“ mobilen WLAN Routers mit verbaut. Denn dieser Roboter soll überall, unabhängig von einem irgendwo fest installierten WLAN, gesteuert werden können. Die auf github bereitgestellte Software basiert auf den Industriestandards Linux, Docker, Robot Operating System (ROS), Python und JavaScript. Die standardmäßig bereitgestellte Software-Architektur des Roboters hat dabei folgenden Aufbau:
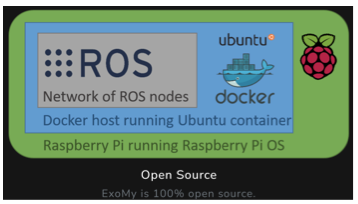
Quelle: https://esa-prl.github.io/ExoMy/
Auf dieser Basis lassen sich etliche hardwareseitige Erweiterungen vornehmen, da für viele Sensoren, Kameras und Steuerungselemente auch die Software-Module, sogenannte „Nodes“, für das Robot Operating System ROS vom jeweiligen Hersteller bereitgestellt werden.
Individuelle Anpassungen
Für Cloud-seitige Erweiterungen wurden die Ideen im Blog-Artikel von René Bremer „Intelligent, realtime and scalable video processing in Azure“ genutzt. Dort wird die Verarbeitung von Videos in der Microsoft Azure Cloud mit Hilfe der Azure Cognitive Services vorgestellt. Der Autor hält dafür in seinem mittlerweile drei Jahre alten github Repository Anleitungen und Programmcode bereit. Zwischenzeitlich vorgenommene Software Updates in Programmiersprache und Libraries erforderten, dass der zugehörige Programmcode detailliert geprüft und teilweise angepasst werden musste.
Der ExoMy-Roboter erzeugt kein fertiges Video, sondern nur einen Video-Stream, der mit der Steuerungs-Software im Browser lediglich betrachtet werden kann. Daher hat Stefan Scharr eigens eine Software-Erweiterung entwickelt, die die lokale Speicherung des Video-Streams als Video im MP4-Format und den Upload des Videos in die Microsoft Azure-Cloud durchführt.
Die Cloud-seitigen Erweiterungs-Komponenten wurden unabhängig von der jeweiligen Hardware konzipiert und entwickelt.
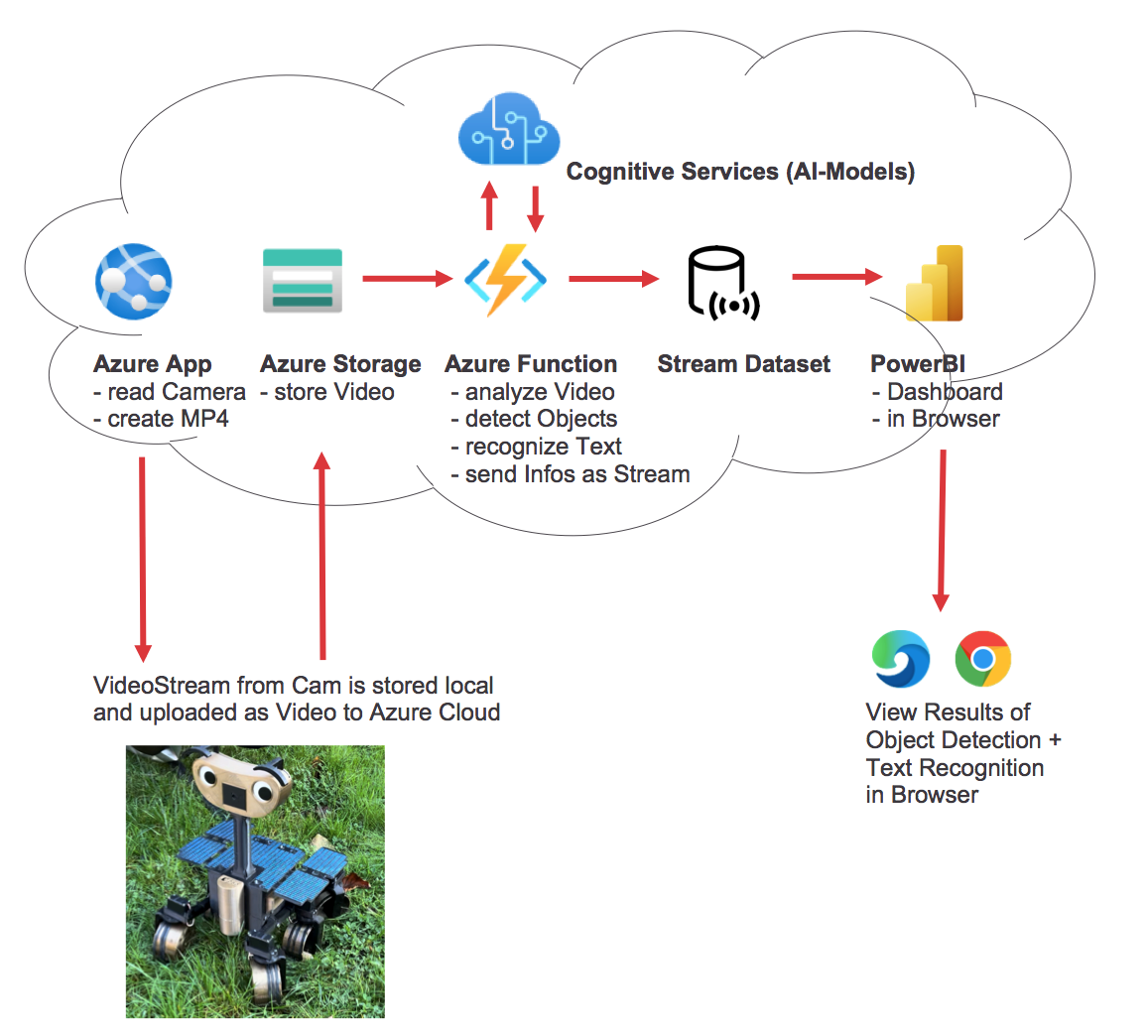
Daher lässt sich diese Architektur auch mühelos auf andere Hardware anpassen, die ein Kamerabild oder einen Videostream liefert. Beispielsweise können Überwachungskameras an Hauseingängen oder Kameras von Drohnen an diese Cloud-Architektur angebunden werden. Durch die Nutzung von „serverless Azure Functions“ ist die Cloud-seitige Architektur auch bereits skalierbar. Das bedeutet, dass bei einer größeren Anzahl von angeschlossenen Kameras keine Architektur-Änderungen vorgenommen werden müssen, wenn plötzlich deutlich mehr Videos gleichzeitig analysiert werden sollen.
Auf individuelle Nutzung ausbaubar
Eine weitere Ergänzung ist bereits implementiert, aber aktuell noch vom ExoMy-Roboter ungenutzt: die kundenspezifische Erkennung von Objekten. Mit Hilfe des Cloud-Moduls Azure Custom Vision können KI-Modelle bereits mit geringen Datenmengen dazu trainiert werden, weitere Objekte oder Unterschiede zu erkennen. So werden beispielsweise nur 25 Fotos benötigt, um ein KI-Modell so trainieren, dass es erkennt, ob sich auf einer Fläche Graffiti-Malereien befinden oder nicht. Die Custom Vision wird so in industriellen Prozessen genutzt, um zu unterscheiden, ob Glasflaschen ausreichend sauber gereinigt wurden. In der Landwirtschaft wird sie eingesetzt, um zu prüfen, ob eine Pflanze von Pilzen befallen ist. Der kundenspezifischen Nutzung sind somit kaum Grenzen gesetzt – auch, wenn es kein Einsatz auf dem Mars ist.
Sie möchten Ihr Unternehmen zukunftsfähig machen? Dann zögern Sie nicht, mich zu kontaktieren. Ich analysiere Prozessstrukturen, unterstütze Sie bei der Optimierung von Abläufen und finde Wege, aktuelle Techniken der Digitalisierung nutzenbringend für Ihr Unternehmen einzusetzen.
Alle Produktnamen sind geschützte Marken und Markennamen der jeweiligen Hersteller.